
今天聊一下超声波雷达、毫米波雷达、激光雷达都有什么区别和优劣势?最近特斯拉更新了autopilot纯视觉方案Tesla vision,我看很多人对雷达有点分不清区别,这期给大家好好分析一下这三者到底都有什么不同。
·首先说超声波雷达,它被称为超声波,是因为它使用的是人耳听不到的高频率的一个声波,做原理确实与蝙蝠使用的声纳定位类似,利用这种高频的一个声波来探测物体,通过接收这些回声来确定物体的位置、距离和大小。但是声波在传播的一个过程中它会衰减,特别是在空气中,高频率的超声波衰减的更快,这也就限制了它的一个有效范围。


超声波的传感器结构也比较简单,耐用性也比较强,成本也比较低,对近距离的障碍物的检测非常的有效,但是它不利于远距离的一个信号传播,其探测距离在0.1-3米之间,精度最高。所以这种方法在汽车的停车辅助系统中,用于泊车辅助和盲区碰撞预警,主要安装在前保险杠上,作为一个倒车雷达或者是倾向测距。

另外提醒一下,我们停车的时候听到的嘟嘟嘟声不是超声波本身的一个声音,这是车辆停车辅助系统中的一个警报系统。
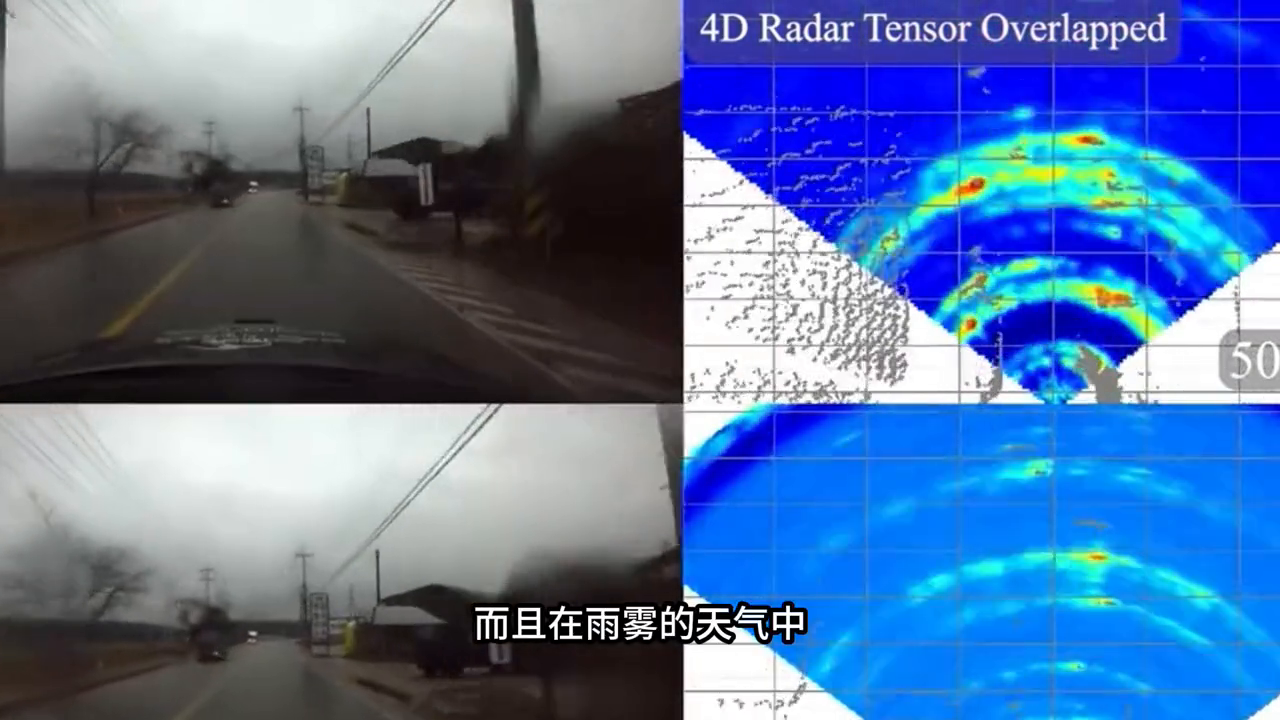
·接着说毫米波雷达,这类雷达使用的电磁波波长在毫米级别,因此也被称为毫米波,把无线电波发射出去,根据接收回波与发送的时间差来测量位置的距离数据。一般的探测距离在0-200米之间,据说最高达到1公里。与激光雷达相比,尤其是在恶劣的天气条件下,毫米波雷达能够更有效的穿透雨雾,以及其他能见度比较低的一个环境。
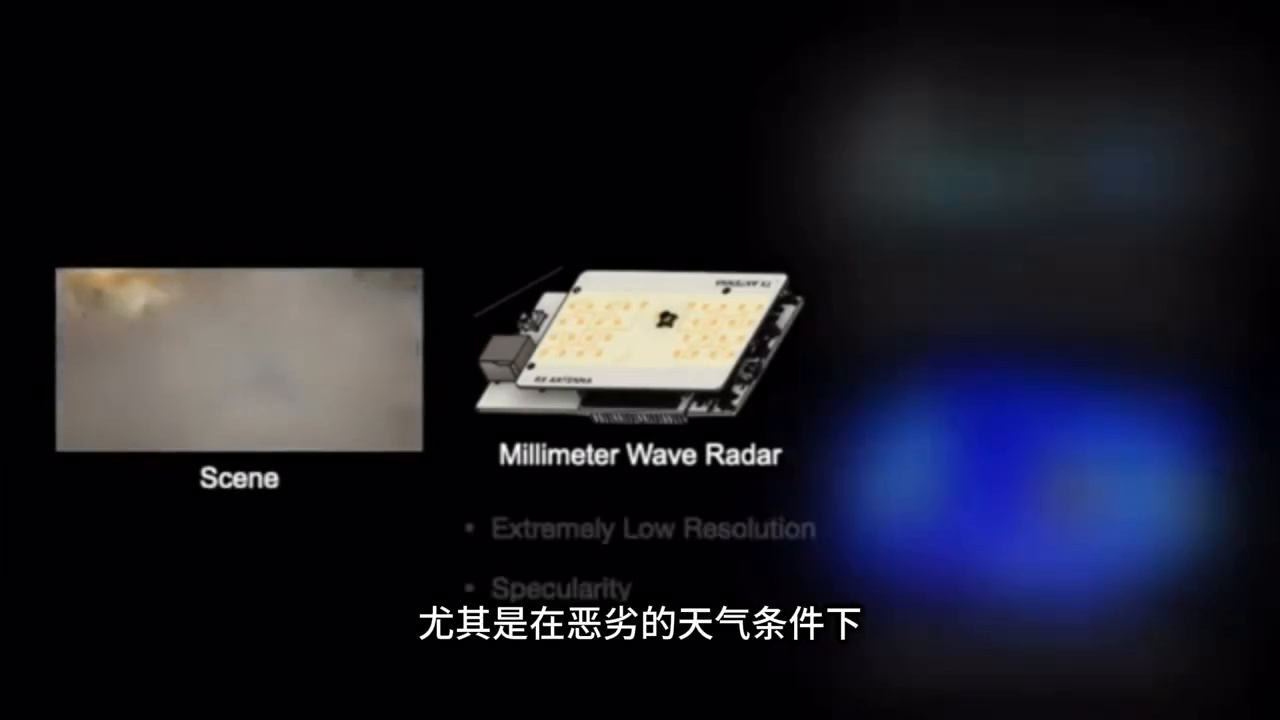
激光雷达虽然说提供了更精细的一个图像和更精确的距离测量,但是它的光波容易被一些小的颗粒,比如雨雾的散射,从而降低了在恶劣天气条件下有效探测距离。
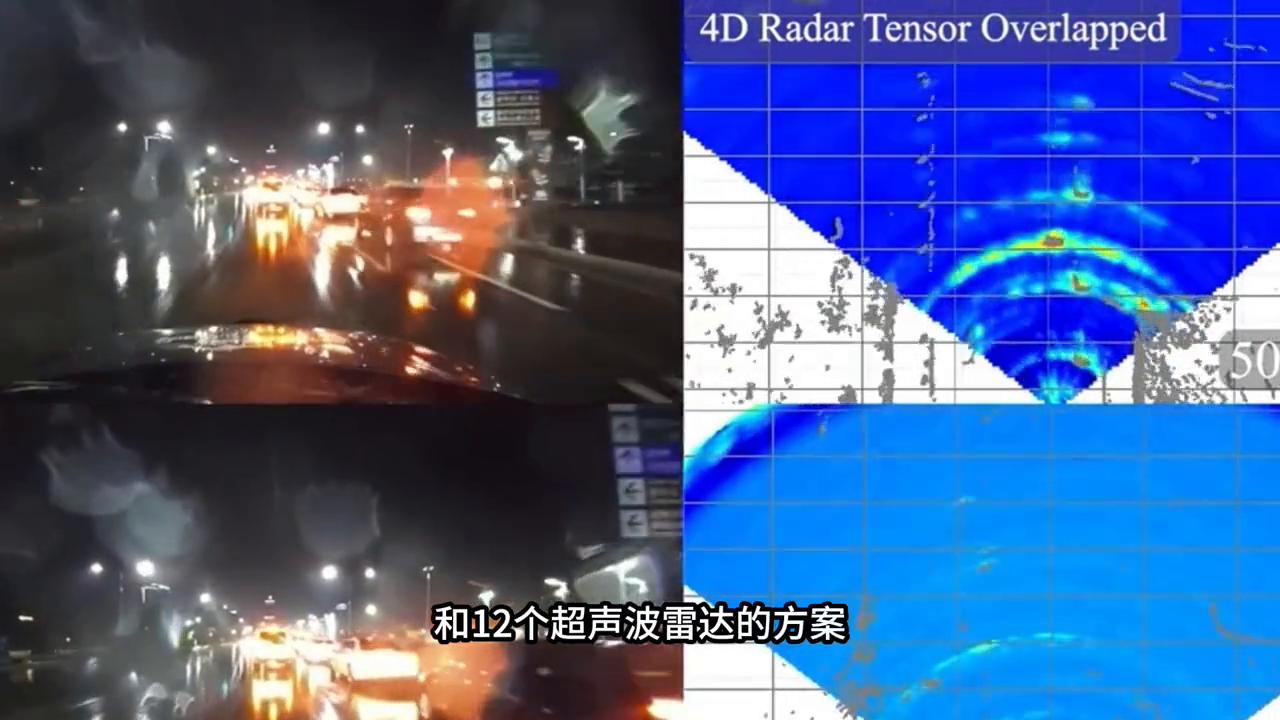
但是毫米波的缺点是无法准确地判断障碍物的一个立体轮廓,也无法判断物体的颜色。而且在雨雾的天气中,它的性能会衰减,穿透能力也会比较差,一般需要与摄像头搭配使用。像特斯拉之前一直采用的方案就是一颗毫米波雷达和12个超声波雷达的方案。毫米波雷达主要是应用于自适应巡航、自动刹车辅助系统等,安装在汽车的前部、车辆的后保险杠内侧、前保险杠内侧等处。
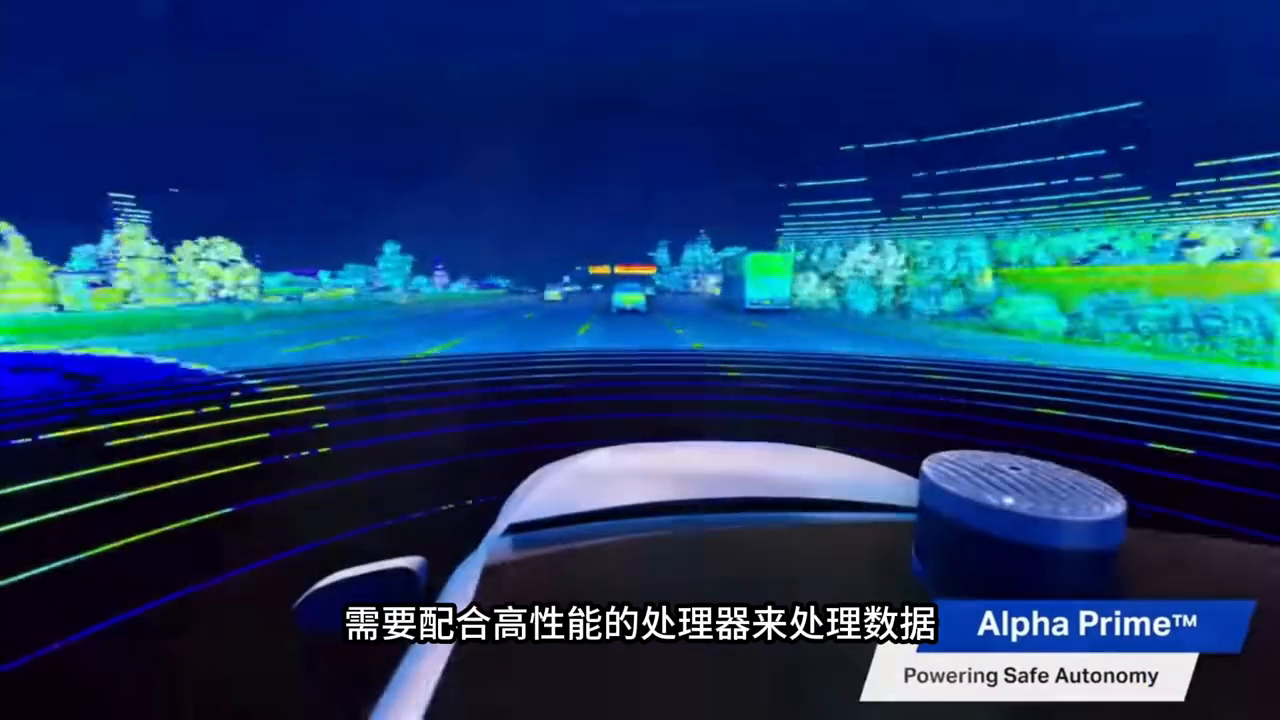
最后说说激光雷达。它是通过目标发射探测激光束,然后将接收到从目标反射回来的信号与发射信号进行比较,做适当处理之后就可以获得目标的有关信息。比如目标的距离、方位、高度速度、姿态甚至形状等参数。探测范围一般是200米到300米,最高据说是500米。因为光速很快,所以是所有的雷达中传播速度最快的。探测精度也是最高的,稳定性也很强,识别障碍物的立体轮廓也更准确。
但是它也有劣势,比如说不能够判断颜色信息,恶劣天气的效果也是比较差,不能够绕过障碍物的探测,需要配合高性能的处理器来处理数据,成本非常的高,体积也很大。
使用场景其实跟毫米波雷达是类似的。百度集团的资深副总裁李震宇前不久前还公开地表示,激光雷达目前存在的挑战,一个是车规级产品难度高,二是成本高,三是寿命短。两年前马斯克也在公开说过一句话,说谁用激光雷达谁就是傻子。所以特斯拉至今都没有采用过激光雷达。
激光雷达的价格普遍是在500-1000美元,而最新的4D成像毫米波雷达的价格仅其为10%到20%,超声波雷达的价格最低。而这次马斯克大刀阔斧的向所有的车都推送新版本的Tesla vision,全面采用视觉辅助驾驶系统。我觉得其实是因为特斯拉的神经网络和超级计算机越来越成熟了才敢全面弃用超声波和毫米波雷达。虽然比较激进,但是早晚也是必然的。
但现在你对这三种雷达更清楚了吗?怎么看待特斯拉全面弃用雷达这件事我们评论区见,下期聊聊4D毫米波雷达。
关注我,带你了解更多特斯拉电车的知识。我们下期见,电车托尼。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至827202335@qq.com 举报,一经查实,本站将立刻删除。原文转载: 原文出处:
 微信扫一扫
微信扫一扫 